
To start the rig construction on bender, i first focused my attention on creating the legs, compared to the devil robots legs that come out from the sides of his pelvis, benders leg design is slightly different, as his legs are attached to his body from directly underneath, the custom rig have its legs default to the sides of the pelvis, the model tool was required to straighten the legs and place them directly under the pelvis.
Also noted on benders design even though the legs have knee joints, the rig legs will be positioned as straight as possible, because benders leg design does not have knees.

After sorting out the basic positioning of benders rig legs, this screen shot now focuses on a added spine with 5 segments as standard, but as this spine is not needed to bend benders body, it's just there to help build up the rig.

A close look on the rig construction, the arms are created using two bones, one long one for the arm and one scaled one for the hand.

The head construction was made using another spine and an add bone tool, which is not connected by a spine and can be placed anywhere near the last spine or rig section, doing this the head mesh will be linked to this add bone rig piece, this way the head mesh and rig piece can help not disjoint the rest of the model when animated.

A screen shot showing the head add bone rig piece being scaled to the size of benders head.

A process overall shot so far and at this stage benders rig is coming on really well, with some minor adjustments to the legs, adding benders fingers and making sure all the rig pieces are inside the mesh, bender is almost ready to be linked together.

Using the scale tool to scale down the legs to fit in the mesh.
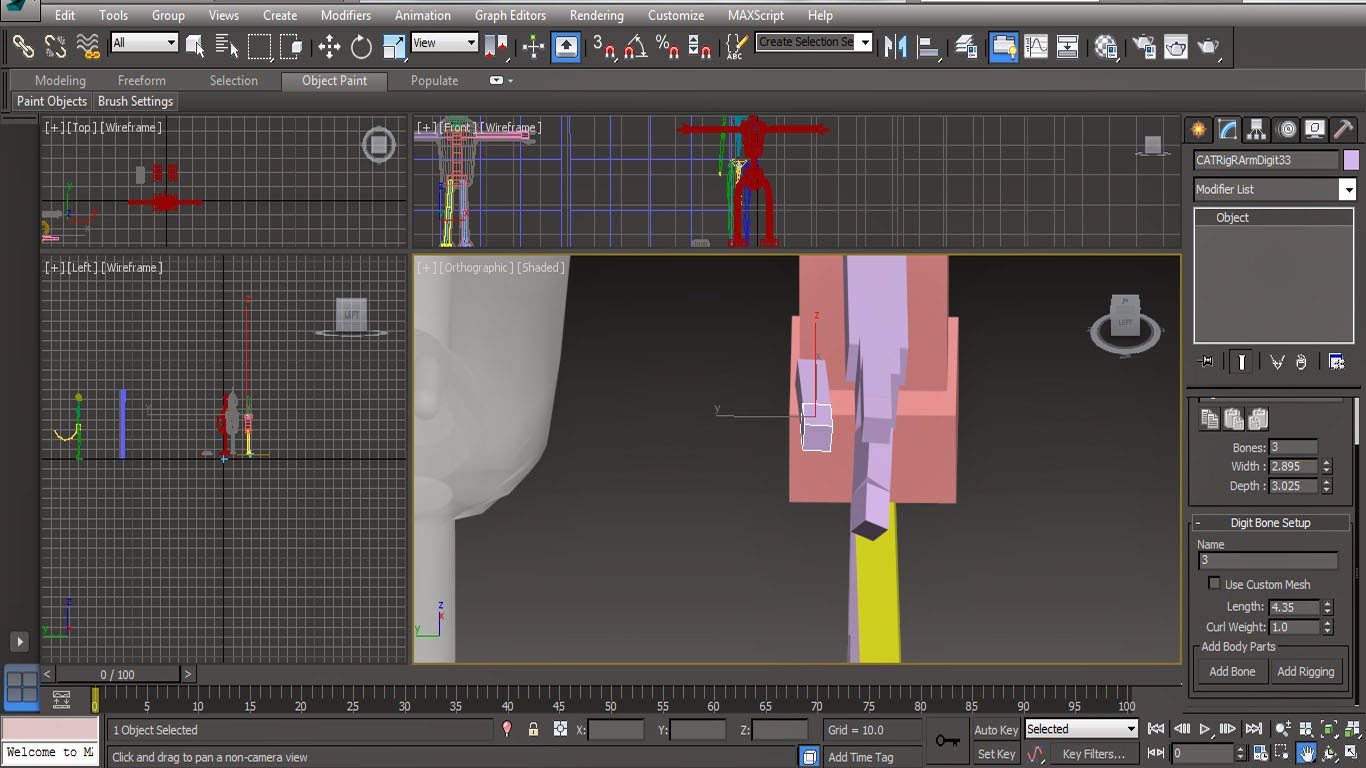
Using the add bone option again, three square rig fingers were created, each finger has three segments, this was done to help the fingers bend, if he is required to grab something.

A screen shot of the fingers scaled and positioned in place.

A finished overview shot of bender.

Moving onto the devil robot, he was a bit easier to work with as his legs are designed to come out of his pelvis, but as his legs are designed to bend out and round, more leg sections were needed { 4 pieces }
each piece was rotated, scaled and positioned in place to the mesh.

Using the same idea for the arm rig construction as bender, the fingers are also add bone pieces with three sections to help the devil robot grab things and bend this fingers.

The overall design of the devil robot was a lot better for placing a rig because the devil robot has multiple connecting body pieces, so the devil robots rig construction is made up of a lot of spines, from his tail, to his neck.

A screen shot showing the devil robot receiving his neck spine to the back of his head, each spine has 4 sections as this is plenty for the devil robot to bend his head up and down, the neck being curved, the spine pieces had to be selected and rotated and scaled to follow the shape of the neck.

Another add bone was added under the head to help operate the jaw to open and close it.

An overview shot of the finished rig.
No comments:
Post a Comment